|
|||
|
|
|
|||
|
|
Base class for embedder algorithms. More...
#include <ogdf/planarity/EmbedderModule.h>
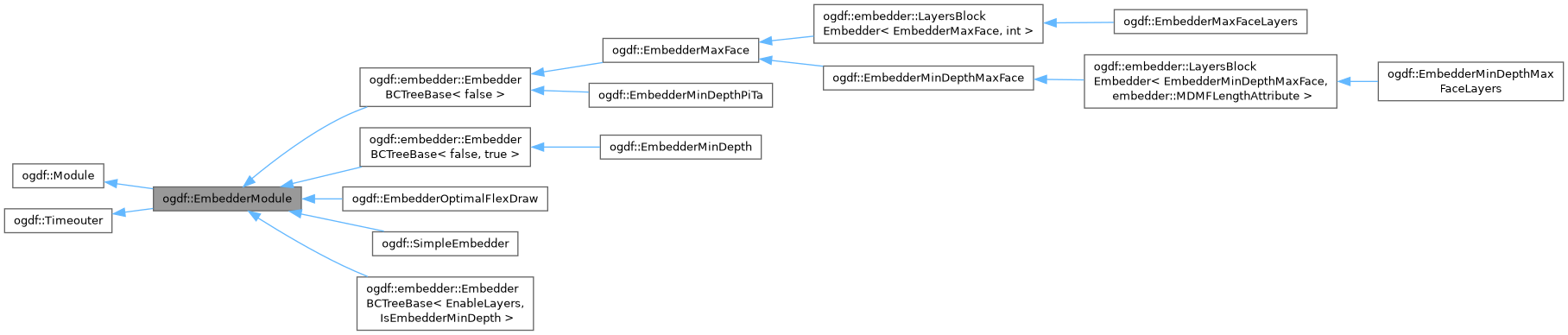
 Inheritance diagram for ogdf::EmbedderModule:
Inheritance diagram for ogdf::EmbedderModule:Public Member Functions | |
| EmbedderModule () | |
| Initializes an embedder module. | |
| virtual | ~EmbedderModule () |
| void | call (Graph &G, adjEntry &adjExternal) |
Calls the embedder algorithm for graph G. | |
| void | operator() (Graph &G, adjEntry &adjExternal) |
Calls the embedder algorithm for graph G. | |
| Public Member Functions inherited from ogdf::Module | |
| Module () | |
| Initializes a module. | |
| virtual | ~Module () |
| Public Member Functions inherited from ogdf::Timeouter | |
| Timeouter () | |
| timeout is turned of by default | |
| Timeouter (bool t) | |
| timeout is turned off (false) or on (true) (with 0 second) | |
| Timeouter (const Timeouter &t) | |
| Timeouter (double t) | |
| timeout is set to the given value (seconds) | |
| ~Timeouter () | |
| bool | isTimeLimit () const |
| returns whether any time limit is set or not | |
| Timeouter & | operator= (const Timeouter &t) |
| double | timeLimit () const |
| returns the current time limit for the call | |
| void | timeLimit (bool t) |
| shorthand to turn timelimit off or on (with 0 seconds) | |
| void | timeLimit (double t) |
| sets the time limit for the call (in seconds); <0 means no limit. | |
Protected Member Functions | |
| virtual void | doCall (Graph &G, adjEntry &adjExternal)=0 |
Calls the embedder algorithm for graph G. | |
Additional Inherited Members | |
| Public Types inherited from ogdf::Module | |
| enum class | ReturnType { Feasible , Optimal , NoFeasibleSolution , TimeoutFeasible , TimeoutInfeasible , Error } |
| The return type of a module. More... | |
| Static Public Member Functions inherited from ogdf::Module | |
| static bool | isSolution (ReturnType ret) |
Returns true iff ret indicates that the module returned a feasible solution. | |
| Protected Attributes inherited from ogdf::Timeouter | |
| double | m_timeLimit |
| Time limit for module calls (< 0 means no limit). | |
Base class for embedder algorithms.
An embedder algorithm computes a planar embedding of a planar graph. Usually, such an algorithm optimizes some properties of the embedding. for example, it might maximize the number of nodes incident with the outer face.
Definition at line 49 of file EmbedderModule.h.
|
inline |
Initializes an embedder module.
Definition at line 52 of file EmbedderModule.h.
|
inlinevirtual |
Definition at line 54 of file EmbedderModule.h.
Calls the embedder algorithm for graph G.
G is planar. | G | is the graph that shall be embedded. |
| adjExternal | is set (by the algorithm) to an adjacency entry on the external face of G. |
Definition at line 63 of file EmbedderModule.h.
|
protectedpure virtual |
Calls the embedder algorithm for graph G.
G is guaranteed to be planar. See call .
Implemented in ogdf::EmbedderMaxFace, ogdf::EmbedderMinDepth, ogdf::EmbedderMinDepthMaxFace, ogdf::EmbedderMinDepthPiTa, ogdf::EmbedderOptimalFlexDraw, and ogdf::SimpleEmbedder.
Calls the embedder algorithm for graph G.
Definition at line 73 of file EmbedderModule.h.