|
|||
|
|
|
|||
|
|
Forms the virtual base class for all possible constraints given in pool format. More...
#include <ogdf/lib/abacus/constraint.h>
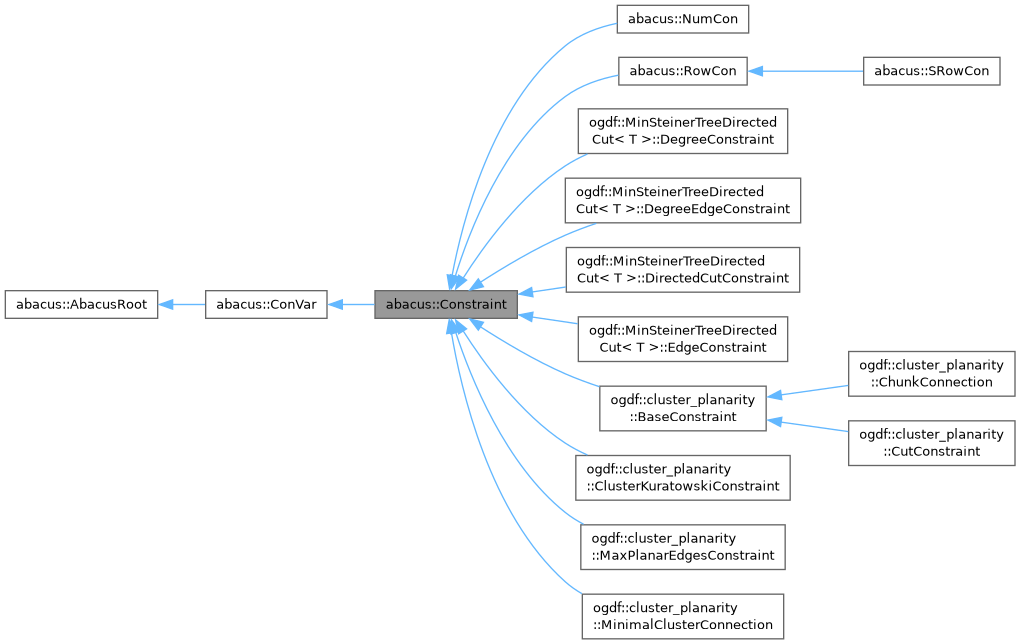
 Inheritance diagram for abacus::Constraint:
Inheritance diagram for abacus::Constraint:Public Member Functions | |
| Constraint (const Constraint &rhs) | |
| Copy constructor. | |
| Constraint (Master *master) | |
| Initializes an empty constraint. | |
| Constraint (Master *master, const Sub *sub, CSense::SENSE sense, double rhs, bool dynamic, bool local, bool liftable) | |
| Initializes a constraint. | |
| virtual | ~Constraint () |
| ConClass * | classification (Active< Variable, Constraint > *var=nullptr) const |
| Returns a pointer to the classification of the constraint. | |
| virtual double | coeff (const Variable *v) const =0 |
| Returns the coefficient of the variable v in the constraint. | |
| virtual double | distance (double *x, Active< Variable, Constraint > *actVar) const |
| Returns the Euclidean distance of x associated with variable set actVar to the hyperplane induced by the constraint. | |
| virtual int | genRow (Active< Variable, Constraint > *var, Row &row) const |
| Generates the row format of the constraint associated with the variable set var. | |
| bool | liftable () const |
| Checks if the constraint is liftable. | |
| void | printRow (std::ostream &out, Active< Variable, Constraint > *var) const |
| Writes the row format of the constraint associated with the variable set var to output stream out. | |
| virtual double | rhs () const |
| Returns the right hand side of the constraint. | |
| CSense * | sense () |
| Returns a pointer to the sense of the constraint. | |
| const CSense * | sense () const |
| Returns a const pointer to the sense of the constraint. | |
| virtual double | slack (Active< Variable, Constraint > *variables, double *x) const |
| Computes the slack of the vector x associated with the variable set variables. | |
| virtual bool | valid (Sub *sub) const |
| Checks if the constraint is valid for the subproblem sub. | |
| virtual bool | violated (Active< Variable, Constraint > *variables, double *x, double *sl=nullptr) const |
| Checks if a constraint is violated by a vector x associated with a variable set. | |
| virtual bool | violated (double slack) const |
| Checks if a constraint is violated given the slack of a vector. | |
| Public Member Functions inherited from abacus::ConVar | |
| ConVar (Master *master, const Sub *sub, bool dynamic, bool local) | |
| Creates an instance of type ConVar. | |
| virtual | ~ConVar () |
| bool | active () const |
| Checks if the constraint/variable is active in at least one active subproblem. | |
| virtual bool | dynamic () const |
| Return true if the constraint/variable is dynamic. | |
| virtual bool | equal (const ConVar *cv) const |
| Should compare if the constraint/variable is identical (in a mathematical sense) with the constraint/variable cv. | |
| bool | global () const |
| Returns true if the constraint/variable is globally valid, false otherwise. | |
| virtual unsigned | hashKey () const |
| Should provide a key for the constraint/variable that can be used to insert it into a hash table. | |
| bool | local () const |
| Returns true if the constraint/variable is only locally valid, false otherwise. | |
| virtual const char * | name () const |
| Should return the name of the constraint/variable. | |
| virtual void | print (std::ostream &out) const |
| Writes the constraint/variable to the output stream out. | |
| virtual double | rank () const |
| The function should return a rank associated with the constraint/variable. | |
| const Sub * | sub () const |
| Returns a const pointer to the subproblem associated with the constraint/variable. | |
| void | sub (Sub *sub) |
| Associates a new subproblem with the constraint/variable. | |
| bool | expanded () const |
| Returns true if the expanded format of a constraint/variable is available, false otherwise. | |
| virtual void | expand () const |
| Expands a constraint/variable. | |
| virtual void | compress () const |
| Compresses a constraint/variable. | |
| virtual bool | deletable () const |
| Returns true if the constraint/variable can be destructed. | |
| Public Member Functions inherited from abacus::AbacusRoot | |
| virtual | ~AbacusRoot () |
| The destructor. | |
Protected Member Functions | |
| virtual ConClass * | classify (Active< Variable, Constraint > *var) const |
| The default implementation returns a 0 pointer. | |
| virtual InfeasCon::INFEAS | voidLhsViolated (double newRhs) const |
| Can be called if after variable elimination the left hand side of the constraint has become void and the right hand side has been adapted to newRhs. | |
Protected Attributes | |
| ConClass * | conClass_ |
| bool | liftable_ |
| This member is true if also coefficients of variables which have been inactive at generation time can be computed, false otherwise. | |
| double | rhs_ |
| The right hand side of the constraint. | |
| CSense | sense_ |
| The sense of the constraint. | |
| Protected Attributes inherited from abacus::ConVar | |
| bool | dynamic_ |
| If this member is true then the constraint/variable can be also removed from the active formulation after it is added the first time. | |
| bool | expanded_ |
| true, if expanded version of constraint/variables available. | |
| bool | local_ |
| true if the constraint/variable is only locally valid | |
| Master * | master_ |
| A pointer to the corresponding master of the optimization. | |
| int | nActive_ |
| The number of active subproblems of which the constraint/variable belongs to the set of active constraints/variables. | |
| int | nLocks_ |
| The number of locks which have been set on the constraint/variable. | |
| int | nReferences_ |
| The number of references to the pool slot the constraint is stored in. | |
| const Sub * | sub_ |
| A pointer to the subproblem associated with the constraint/variable. | |
Private Member Functions | |
| const Constraint & | operator= (const Constraint &rhs) |
Friends | |
| class | LpSub |
Additional Inherited Members | |
| Static Public Member Functions inherited from abacus::AbacusRoot | |
| static bool | ascii2bool (const string &str) |
| Converts the string str to a boolean value. | |
| static bool | endsWith (const string &str, const string &end) |
| Returns true if str ends with end, false otherwise. | |
| static double | fracPart (double x) |
| Returns the absolute value of the fractional part of x. | |
| static const char * | onOff (bool value) |
| Converts a boolean variable to the strings "on" and "off". | |
Forms the virtual base class for all possible constraints given in pool format.
Constraints are one of the central items in a linear-programming based branch-and-bound algorithm. This class forms the virtual base class for all possible constraints given in pool format and is derived from the common base class ConVar of all constraints and variables.
Definition at line 56 of file constraint.h.
|
inline |
Initializes a constraint.
| master | A pointer to the corresponding master of the optimization. |
| sub | A pointer to the subproblem associated with the constraint. This can be also a 0-pointer. |
| sense | The sense of the constraint. |
| rhs | The right hand side of the constraint. |
| dynamic | If this parameter is true, then the constraint can be removed from the active constraint set during the cutting plane phase of the subproblem optimization. |
| local | If this parameter is true, then the constraint is considered to be only locally valid. In this case the paramument sub must not be 0 as each locally valid constraint is associated with a subproblem. |
| liftable | If this parameter is true, then a lifting procedure must be available, i.e., that the coefficients of variables which have not been active at generation time of the constraint can be computed. |
Definition at line 288 of file constraint.h.
|
inline |
Initializes an empty constraint.
This constructor is, e.g., useful if parallel separation is applied. In this case the constraint can be constructed and receive later its data by message passing.
| master | A pointer to the corresponding master of the optimization. |
Definition at line 305 of file constraint.h.
|
inline |
Copy constructor.
| rhs | The constraint being copied. |
Definition at line 104 of file constraint.h.
|
inlinevirtual |
Definition at line 111 of file constraint.h.
| ConClass * abacus::Constraint::classification | ( | Active< Variable, Constraint > * | var = nullptr | ) | const |
Returns a pointer to the classification of the constraint.
If no classification is available then we try to classify the constraint. In this case var must not be a 0-pointer.
A constraint classification can only be generated if the function classify() is redefined in a derived class.
|
inlineprotectedvirtual |
The default implementation returns a 0 pointer.
Definition at line 260 of file constraint.h.
Returns the coefficient of the variable v in the constraint.
| v | A pointer to a variable. |
Implemented in ogdf::cluster_planarity::BaseConstraint, ogdf::cluster_planarity::ChunkConnection, ogdf::cluster_planarity::ClusterKuratowskiConstraint, ogdf::cluster_planarity::CutConstraint, ogdf::cluster_planarity::MaxPlanarEdgesConstraint, ogdf::cluster_planarity::MinimalClusterConnection, ogdf::MinSteinerTreeDirectedCut< T >::EdgeConstraint, ogdf::MinSteinerTreeDirectedCut< T >::DegreeConstraint, ogdf::MinSteinerTreeDirectedCut< T >::DegreeEdgeConstraint, ogdf::MinSteinerTreeDirectedCut< T >::DirectedCutConstraint, abacus::NumCon, and abacus::RowCon.
|
virtual |
Returns the Euclidean distance of x associated with variable set actVar to the hyperplane induced by the constraint.
The distance of a point \(\overline{x}\) and a hyperplane \(a^T x = \beta\) can be computed in the following way: Let \(y\) be the intersection of the hyperplane \(a^T x = \beta\) and the line defined by \(\overline{x}\) and the vector \(a\). Then the distance \(d\) is the length of the vector \(||\overline{x} - y||\).
| x | The point for which the distance should be computed. |
| actVar | The variables associated with x. |
|
virtual |
Generates the row format of the constraint associated with the variable set var.
This function is declared virtual since faster constraint specific implementations might be desirable.
All nonzero coefficients are added to the row format. Before we generate the coefficients we try to expand the constraint, afterwards it is compressed again.
| var | The variable set for which the row format should be computed. |
| row | Stores the row format after calling this function. |
Reimplemented in abacus::SRowCon.
|
inline |
Checks if the constraint is liftable.
I.e., if the coefficients of variables inactive at generation time of the constraint can be computed later.
Definition at line 140 of file constraint.h.
|
private |
| void abacus::Constraint::printRow | ( | std::ostream & | out, |
| Active< Variable, Constraint > * | var | ||
| ) | const |
Writes the row format of the constraint associated with the variable set var to output stream out.
| out | The output stream. |
| var | The variables for which the row format should be written. |
Returns the right hand side of the constraint.
Definition at line 130 of file constraint.h.
|
inline |
Returns a pointer to the sense of the constraint.
Definition at line 115 of file constraint.h.
Returns a const pointer to the sense of the constraint.
Definition at line 118 of file constraint.h.
|
virtual |
Computes the slack of the vector x associated with the variable set variables.
| variables | The variable set associated with the vector x. |
| x | The values of the variables. |
Reimplemented in abacus::SRowCon.
Checks if the constraint is valid for the subproblem sub.
Per default, this is the case if the constraint is globally valid, or the subproblem associated with the constraint is an ancestor of the subproblem sub in the enumeration tree.
| sub | The subproblem for which the validity is checked. |
Definition at line 309 of file constraint.h.
|
virtual |
Checks if a constraint is violated by a vector x associated with a variable set.
| variables | The variables associated with the vector x. |
| x | The vector for which the violation is checked. |
| sl | If sl is nonzero, then *sl will store the value of the violation, i.e., the slack. |
Checks if a constraint is violated given the slack of a vector.
| slack | The slack of a vector. |
|
protectedvirtual |
Can be called if after variable elimination the left hand side of the constraint has become void and the right hand side has been adapted to newRhs.
Then this function checks if the constraint is violated.
| newRhs | The right hand side of the constraint after the elimination of the variables. |
Definition at line 58 of file constraint.h.
|
mutableprotected |
Definition at line 269 of file constraint.h.
|
protected |
This member is true if also coefficients of variables which have been inactive at generation time can be computed, false otherwise.
Definition at line 275 of file constraint.h.
|
protected |
The right hand side of the constraint.
Definition at line 267 of file constraint.h.
|
protected |
The sense of the constraint.
Definition at line 265 of file constraint.h.